�P�D�g�p����PIC�Ə�������̏���
�����ŗ��p����PIC��14�r�b�g18�s����16F84�P�j�ł���(�}�P)�B1KB�̓d�C�I�ɏ����ł���v���O������������84B�̃t���b�V���������������Ă���B�����ł��肠���d�q�H��ɗ��p���ꕶ���������B�Q�j
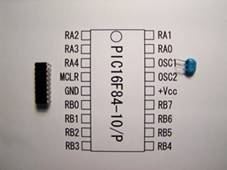
�}�P�@PIC16F84
RA0����RA4,RB0����RB7�܂ł����o�̓|�[�g�ł���A�v���O�����Ŏ��R�Ɋ��t���ł���BOSC1��OSC2�ɂ͊O�����M�q��ڑ�����(�F�̑f�q�A����̓Z�����b�N�ƌĂ�R���f���T���܂�3�[�q�\���ɂȂ��Ă���B������GND���A���[��OSC1,2�ɐڑ�����B4MHz�A10MHz�A20MHz�Ȃǂ����邪�{�e�ł͎��10MHz�𗘗p����)
����PIC�Ƀv���O����������������ɂ͐�p��ROM�������킪�K�v�ł���BPIC�̐������ł���Microchip���R�j��H�t���̏H���d�q�ʏ��S�j����̔�����Ă��邪�A6��~�`2���~���x�̔�p�������荂���ł���B�������A���ɋ����w�̏��Y���j�������T�j�Ŕ��ɒP���Ő��S�~���x�̈������ȏ��������U�j(�}2�E)���Љ��w�Z����ł�
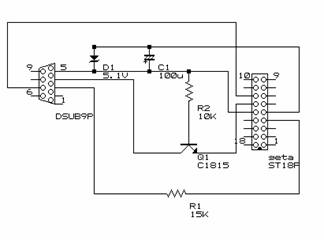
PIC�ւ̏������݂��ȒP�ɂł���悤�ɂȂ����B�͂��߂Ɏs�̂̏������킪�Ȃ��ꍇ�͍쐬����K�v������B�V�j�}�R���Q�l�ɂ��Đ��k�Ƀn���_�t���̗��K�����˂č쐬������Ƃ悢�BPIC(16F84)�����Ă�1000�~�ȓ��ɂ����܂邪PIC�̃\�P�b�g�͊ȒP�Ɏ��O�����\�ȃ��o�[�t�̂���(18P��1000�~���x)���֗��ł���B�܂�����PC�Ɛڑ����邽�߂̃V���A���P�[�u�����K�v�ɂȂ�B

�}�Q�@ROM��������(PIC���C�^�[)
�}�E��PIC��������Microchip�Ђ̏�������ł��鍂�����������PIC�ɑΉ����Ă��Ď��Ђ̖����̏������v���O���������\�t�g�ŗ��p�ł���B�����̓W���p���G���L�b�g�Ŏs�̂���Ă�����́A�}�������Y���j�������ŏЉ��Ă�������Ƃ��V���v����PIC���C�^�ł���B
�}�R�@PIC���C�^�@��H
�@�}�Q�̍���PIC���C�^�̉�H�}�A�ꕔ�m�[�g�p�\�R���ɂ���Ă͏������ł��Ȃ��ꍇ������B
�Q�D�ΏۂƖړI
�@PIC�̗��p�͉��p�͈͂��L���A�����`�b�v�}�C�R���Ƃ����ǂ����ɍ\���͕��G�ɂȂ��Ă���B�����ŕ�����I���������Z����Ώۂɂ��č���͓���Ƃ������ƂŎ��̂悤�ɖړI��ݒ肷��B
�P�D
PIC�̊�{�����̗����ƊȒP�ȃA�Z���u���̗��p
�Q�D
�t�H�g�_�C�I�[�h�𗘗p���Ĕ����́A���d���ʂ̊�b����
�R�D
PIC�ƃt�H�g�_�C�I�[�h�𗘗p������H�̍쐬�ƕ��������ւ̉��p
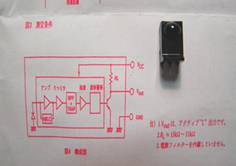
���݂ł�PIC�p�̌���Ƃ���C��Basic�W�j���o�ꂵ�Ă��邪�����PIC�̃n�[�h�E�F�A�̗����ɖ𗧂A�Z���u���X�j�𗘗p����B�܂������ŗ��p����t�H�g�_�C�I�[�h��Sanyo����SPS-443-110�j(�}�S)�Ƃ����e���r�̃����R�����ɗ��p����Ă�����̂�p����B���̑f�q�͌u�����Ȃǂɂ��듮���j�~�����H�������Ă��邤���ɕ��ʂ̔��M���C�g�ŊȒP�Ɍ��X�C�b�`���쐬�ł���Ƃ�������������B
�}�S�@IR�����@��H
�@OPIC�ƌĂ��SPS-443-1�Ƃ��̓�����H�B�����ł��邪PIN���Z���d�q�H��ɂ͕s�ւȂƂ��������B���ɂ��قړ����K�i�̑f�q�����邪�ȒP�Ȍ��X�C�b�`�Ƃ��đ�p�ł�����͕̂M�҂̎�����������ł�SPS-443-1��1S1U60�݂̂ł������B
�R�D�u���b�h�{�[�h�𗘗p����LED�_�Ŏ��K
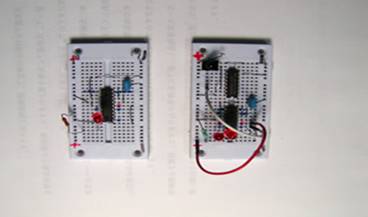
�@�͂��߂ɂ����Ƃ���{�I��LED�̓_�ʼn�H��g�ݗ��Ă�B����ɂ͐}�T�ɂ���悤�ȃu���b�h�{�[�h�𗘗p����Ƃ悢�B�}�T����LED1�̓_�ʼn�H�ł���E���t�H�g�_�C�I�[�h���X�C�b�`�ɂ���LED�̓_�ʼn�H�ł���B
�}�T�@LED�����ƌ��X�C�b�`��H
�@�}����RB0�̃|�[�g��LED���ڑ�����Ă���B�E�̃{�[�h����ɂ���̂�SPS-443-1�ł��̉������W�b�N�f�q74HC04�ł���B
�����̉�H�}���}�U�C�V�ɂ���B�܂�LED�̓_�ʼn�H���쐬���āALED.ASM11�j��K���ȃG�f�B�^�A�܂���Windows�̃������𗘗p���ď���MPLAB�𗘗p���ăA�Z���u������B12�j����PC�ƍ쐬����PIC���C�^���V���A���P�[�u���Őڑ����A18�s���̃\�P�b�g��PIC(16F84)�������̊ԈႢ���Ȃ��悤�ɑ}������BMPLAB�ō쐬���ꂽLED.HEX�t�@�C����icprog.exe13�j�𗘗p����PIC�ɏ������݂������Ȃ��B�������������PIC���쐬�����u���b�h�{�[�h�Ɉڂ��ēd�������Ă݂�B���k�͂����܂ł��łɂR��̊����̌������Ă��邱�ƂɂȂ�B1�ڂ͍ŏ��̃A�Z���u�������܂��R���p�C�����ꂽ���ŁA2�ڂ͏������݂����܂����������ł���A3�ڂ͐�������H�����삵�����ł���BLED.ASM�͊ȒP��LED�̐��𑝂₵����A�_�ŊԊu��ύX������ł���B�P���Ȃ��̂P��LED���g�p������H��PIC�̓�����m��ɂ͍ł���{�I�ŏd�v�ȉ�H�ł���B���̉�H�œ_�����Ԃ�ς�����ALED�𑝂₵���肵�Ď��s������J��Ԃ��A���ꂽ��Ɏ��̃t�H�g�_�C�I�[�h���X�C�b�`�ɂ�����H�ɃX�e�b�v�A�b�v����B
�}�U�@���K�p�@LED������H
LED.ASM���R���p�C�����ALED.HEX��PIC���C�^��16F84�ɏ�������
�}�V�@���K�p�@���X�C�b�`��H
IRLED.ASM���R���p�C���AIRLED.HEX��PIC���C�^��16F84�ɏ�������
�S�D�t�H�g�_�C�I�[�h���g�p�������X�C�b�`�̎��K
�}�V�p�̃A�Z���u����IRLED.ASM11�j�ł���B��Ɠ��l�ɂ��ăv���O�������������݁A�}�T�E���Q�l�ɂ��ău���b�h�{�[�h��ɉ�H��g�ݗ��Ă�BIRLED.HEX�̏������܂ꂽPIC���u���b�h�{�[�h��ɉ�H�Ɉڂ��A��H��������������Z���T�̎���������r�I�Â����āA�X�C�b�`������B���ɔ��M�����Z���T�ɏƎ˂����LED�̔����̎d�����v���O�����ɂ��ω�����B���̃u���b�h�{�[�h��ɂ͌��ɂ��X�C�b�`�����蓮�삳���邽�߂�NOT�̖���������_���f�q74HC0414�j�𗘗p���Ă���B���k�͌��Ɠd�C�̂Ȃ��������m���߂Ȃ���������A�����̂̓�����m�铱���ɂȂ�B
�@�����Ŏg�p���Ă���t�H�g�_�C�I�[�h�͐}4�̂悤�Ƀm�C�Y�̃g���b�v��H�ƃg�����W�X�^���g�ݍ��킳���Ăł��Ă���B��{�I�ɂ̓Z���T����PN�ڍ��ł���A���̐����ƌ��d���ʂɂ��Ă̊w�K���ł���B�܂��O���d����^���Ȃ��Ŕ��M���A��������TV�����R���̐ԊO���Ă�Ɛ}�W�̂悤�Ɂ{�[�q���畉�̋N�d�͂���B
�}�W�@���N�d�͌���
SPS-443-1�ɓd�����Ȃ����Ɂ{�[�q�̓d�����I�V���X�R�[�v�ő��肵���B�����Ǝ˂���Ɓ|0.3V���x�̋N�d�͂�������B
����͎��̐}�X�̂悤�ɋ�R�w�̌��q�ɂ��d�q�|�z�[�����ΐ��������Ɠd�q��N�w�Ƀz�[����P�w�Ɉړ����邽�߂�P�������E�ߏ�ɂȂ�AN�����d�q�ߏ�ɂȂ�B�]���ēd�ʍ���V��������̂ł���B���ꂩ��t�H�g�_�C�I�[�h�ɋt�o�C�A�X��������Ƌ�R�w���L�����Đڍ��e�ʂ��������A���ɑ��������̂悢������������15)�B
�}�X�@PN�ڍ��̌���
�}����PN�ڍ��̃��f���ł���B����Ɍ����Ǝ˂���Ɛ}�E�̂悤�ɓd�q�Ɛ��E���ΐ������A�t�F���~���ʂ��ω����A�d�ʍ���V��������B
�@���̐����𗘗p���ăt�H�g�_�C�I�[�h���g�����Z���T�����X�C�b�`�ɗ��p�ł���B�}4�̂悤�ɃA���v�Ƒg�ݍ��킳�����Z���T�̏o�͒[�q�͌��ĂĂ����Ԃ�ON(+�TV�j�������A������������������OFF(0V)�Ƃ��ė��p���ł���B�܂��A�������x��ms�����o������x�ł���Ώ\���ɑ����B(�}10)
�}10�@���X�C�b�`
SPS-443-1�ɂTV �d�����Ȃ��A�o�͒[�q�̓d�����I�V���X�R�[�v�ő��肵���B�����Ǝ˂���Ƃ��₭0V�ɗ������ށB
���̂悤�Ȑ����͑���OPIC�ł��݂���B����SPS443�̑��ɂ�CRVP1738�Ȃǂ��o����Ă��邪���҂ɂ͉������x�ɍ�������A�܂����M���Ă�����OFF�̏�Ԉێ����鎞�Ԃ��قȂ�B�g�߂Ȕ��M�������X�C�b�`�ɂ��邽�߂ɂ�SPS443���D��Ă���B10�j�����̃Z���T�ɂ͊��ɃA���v�����g�ݍ��܂�Ă���̂Ő����ɂ��ēd����������Ɖ��M���đf�q������̂Ō��ւł���B
�@���̂悤�ɐg�߂ɂ�������𗘗p����PN�����̓�����m�邱�Ƃ��ł���B����Ƀt�H�g�_�C�I�[�h���̂����d�̔\�͂����邱�Ƃ��瑾�z�d�r�ւ̉��p��A�����d�C�����łȂ��A�����_�C�I�[�h�̂悤�ɓd�C�����𗝉����鏀���ɂ����p�ł���B
�T�D�p�\�R���ƒʐM�����v���@��ւ̉��p
�@PIC�ƃZ���T�̊�b���̌��ł����玟�̂R�Ԗڂ̃X�e�b�v�ɐi�ށB�����ł͎��p�I�ɕ����̎����ɂ���������̂��쐬���邱�Ƃ��l����B�����ł���܂ł̊w�K���������āA���Z���T���X�C�b�`�ɂ���ms�̐��x�����҂ł���^�C�}���l�����B�����RS232C��ʂ��ăp�\�R���ł����Ȃ��A�f�[�^���L�^�A��͂ł���悤�ɂ���B16F84�ɂ͓����ɋL���ł���RAM�������Ă��邪�A�������݂ɐ�ms���K�v�ŗe�ʂ��������̂Ő���Ƌ��ɋL�^��PC���ɔC���邱�Ƃɂ����BPIC��4�N���b�N�łP�̖��߂����Ȃ��A�]����16F84��10MHz�ŋ쓮������P�T�C�N����400ns�̒Z���Ԃŏ�������\�͂������A�A�Z���u�����g���Ƃ��̎��Ԃ����R�ɑg�ݗ��Ă邱�Ƃ��ł���B�܂�RS232C��p����PC�ƒʐM����ꍇ��9600bps�𗘗p����ƂP�T�C�N����104��s�ł���A���̎��Ԃ�PIC�ō�邱���ł���B����ɂ����ŗ��p�����t�H�g�_�C�I�[�h�Z���T�͉��������悢�A���ꂩ�班�Ȃ��Ƃ�ms�P�ʂŗL���ɑ��肪�ł�����X�C�b�`�𗘗p�����^�C�}���쐬�ł������ł���B16F84�ɂ�13��IO�|�[�g�����肱����v���O�����œ��́A�o�͂Ɋ���U�邱�Ƃ��ł���B�����RB0����RB3�܂ł�LED�����ARB4����RB7��4�̃Z���T��ڑ�����B�܂��APC���瑗�镶���ɂ��P�Z���T��ON,OFF�Ԋu���v���ł��ĐU��q�̎������͂���̂ɕ֗��ȃ��[�h�A�Q�̃Z���T��ON�AOFF�����Ԃ��v�����郂�[�h�A�����4�̃Z���T�Ŏ��Ԃ��v�����郂�[�h(�P�ڂ�Start���A�R�̃Z���T��ʉ߂������Ԃ��o��)�̂R��p�ӂ��ALED�łǂ̃��[�h����m�点��悤�ɂ����B�܂��A�U��q���[�h�ł͑Ώە��̑傫���ɏ_��ɑΉ��ł���悤�ɃZ���T�����̌��o�������Ȃ����Ԃ�PC������R���g���[���ł���悤�ɂ����B���̌��X�C�b�`�𗘗p�����^�C�}�[(�Ȍ�PicTimer)�̉�H�}���}11�ł���B
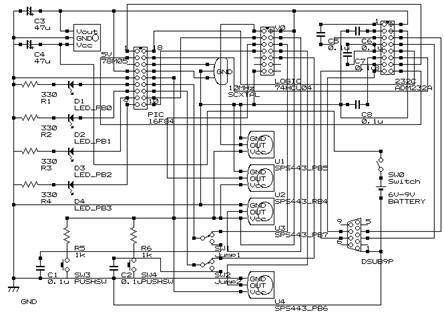
�}11�@PicTimer��H�}
�}��PUSSW�̓e�X�g�p�̃v�b�V���X�C�b�`�ł���ASW1��SW2�ŃZ���T���v�b�V���X�C�b�`���̓��͐ؑւ�������B�S��SPS433�Z���T�͏ォ��RB5,RB4,RB7,RB6�ɐڑ�����A�U��q���[�h��RB7�A2�Z���T���[�h��RB6���X�^�[�g�ARB7���X�g�b�v�ł���A4�Z���T���[�h��RB6���X�^�[�g�ARB7���v�����ԂP�ARB4���v������2�ARB5���v������3�ɂȂ�B
�L�^�����f�[�^��CSV�`���ŕۑ��ł���悤�ɂ��A�\�v�Z�\�t�g�␔�������\�t�g���ʼn�͂ł���悤��PC���̃v���O�������쐬�����B(�}12)�p�\�R�����̃v���O�����̓r�W���A���x�[�V�b�N�ƒʐM�p��OCX16�j��p�����B

�}12�@PicTimer����v���O����
�@PIC�𐧌䂷�邽�߂̃v���O����Visual
Basic�ō쐬�����B�}�ł�W��PIC�ɑ��M���A3�̃��b�v�Ă���B�^�C�}�̃J�E���g��16�r�b�g�𗘗p���Ă���̂�16�i��FFFF�A���Ȃ킿�ő�6.5535�b�܂łɂȂ�B
�U�D������Ղɂ��PicTimer��H�쐬
�@PicTimer�͕K�f�q���������̂Ŋ�����Ղ�p���ĉ�H���쐬����B������Ղɂ���H�̍쐬�ɂ��Ă͂������̕������Q�Ƃł���17�j�������A���܂���p�I�Ȃ��̂����Ȃ��̂ŊȒP�ɂ����ŏЉ�����B�܂��}13�E�̂悤�Ȋ����̌��ł�}11�̉�H�}����ɓK���ȃG�f�B�^18�j��p���č쐬����K�v������B
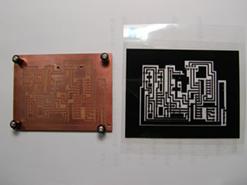
�}13�@������Ղɂ���H�쐬
�@�}�E�̂悤�ɓK���ȃ\�t�g�Ō��ł��쐬���A���[�U�[�v�����^��OHP�p�̓����V�[�g�ɏo�͂���B�}��2���d�˂Ă���B�}���͊������A���������ς܂�����Ղł���B
�@���ɐ}14�̂悤�Ɋ�����Ղƌ����t�A�G�b�`���O�t�Ɖt�Ȃǂ����邽�߂̃g���[���R�p�ӂ���B�P�̃g���[�ɂ͌����t�����A������̃g���[�ɂ̓G�b�`���O�t�����Ė�45�����x�ɂ����A�������͕ۉ���ł������߂Ă����B������p�̌��ł��ł����痠�\���܂������Ȃ��悤�Ɋ�����Ղɍڂ��ăN�����v�ɂ͂��ݏォ����Ă�B(��p�̎��O���u�����łU�����x)
(�}15)�@�������I������猻���t�ɂЂ����Ċ�Ղ���炵�Ȃ����H�}���������яオ��܂Ō�������B(�R�����x)�@�������I��������Ղ͂R�߂̃g���[�ɓ���Đ������āA�\���Ɋ���������B(�����t�͂܂��̂ĂĂ͂Ȃ�Ȃ�)�@���Ɋ�������Ղ��G�b�`���O�n�t�ɐZ���A40������45����ۂ��Ȃ����Ղ���炵����A���Ԃ����肵�A�]���ȓ��𗎂Ƃ��B���������A����H�ʂ������c������A���疌����邽�߂ɍĂю��O�����C�g��2�����x�I�����A�����t�ɂ����B��͂��ꂢ�ɐ�����Ί�Ղ̊����ł���B���̌�̓h�����Ō��������A�K�v�Ȃ�n���_�����Ղ��悤�Ƀ��b�N�X��h���Ďd�グ��B19�j(�}16)�@��͉�H�}11�A�}17���Q�l�ɂ��āA���i���n���_�t�����A��H������������B(�}17)

�}14�@��Ս쐬�ɕK�v�Ȃ��̂P
�@�}���̓G�b�`���O�t�Ɖ��x�v�A�|�͂��݁B�}���������t(DP10)�@�}�E�͊������(10K)���̉��Ɍ�����̂��d�グ�Ɏg�����b�N�X�ł���B

�}15�@��Ս쐬�ɕK�v�Ȃ��̂Q
�@�}���̃N�����v�Ɋ����ł����A�v�����g�A�E�g������H���ł���ɂ��Đ}�E�̌u���ǂŘI������B���ʂ̌u�����ł���p�ł��邪���Ԃ�������B�M�҂�2���v�����g�A�E�g�������̂��d�˂ĂU�����x�I�������B

�}16�@��Ս쐬�ɕK�v�Ȃ��̂R
�@��Ղ�����������h�����Ō����J����B��p�ň����Ȃ��̂��s�̂���Ă���B���������I������烏�b�N�X��h��ƃn���_�̕t���悭�Ȃ�B

�}17�@PicTimer�������
�@�}�̔����e�[�v�������Ă���̂�PIC16F84�ł���B�E��̔���4�̒[�q�ɃZ���TSPS-443��ڑ�����B���オRB6,������RB7�A�E�オRB5�A�E����RB4�ɂȂ�BPIC�̉E��74HC04�̍��ɃW�����p�s���������2���V���[�g������ƃZ���T���X�C�b�`�ɂȂ�A���Q���V���[�g����ƃv�b�V���{�^����RB6,RB7�̃X�C�b�`�ɂ����B
�U�DPicTimer�ɂ�鑪�茋��
�@PicTimer�͐�ɂ��Љ���悤�ɂR�̃��[�h������PC�����琧��ł���B�͂��߂ɐU��q�̎������͂����Ă݂悤�B���̏ꍇ�͊�������PicTimer��PC��RS232C�Őڑ����A�d��������B�͂��߂͂S��LED���_������B
RB7�ɃZ���T�����}18�̂悤�ɃZ���T�ƃ��C�g�̊Ԃ�U��q�̐����ʉ߂���悤�ɃZ�b�g����B�Z�b�g���ł�����PC����PicTimer.exe���N�����V���A���|�[�g�̐ݒ��������P���N���b�N���A�҂����Ԃ�I�����āA�|�[�g���I�[�v�����A����M�{�^���������B

�}18�@�U��q���[�h�Ŏ�������
�@�U��q���[�h���g�����߂ɐU��q���Z���T�ƃ��C�g�̊ԂɃZ�b�g����B�Z���T�ɂ͂���Ȃ��Ȃ������h����ăJ�o�[�����Ă���B
�U��q�̃��[�h�ł�RB7��LOW�̐M���������Ă��玟��LOW�̐M��������܂ł̎��Ԃ����X�ɋL�^���Ă����悤�ɂȂ��Ă���B�������A���܂�ɑ�������LOW�ɂȂ�̂����o�ɂ����Ɛ����܂��Z���T��ʉ߂��ĂȂ���LOW�����o���Ă��܂����Ƃ�����B���̂��߂�PC�����琔�l��PIC�ɑ��肱���P�ʂɂ��Ė�10ms�̃E�F�C�g���[�`�����J��Ԃ��悤�ɂ����B���̃f�[�^(�\1)�͐��l��2�A���Ȃ킿20ms��4���Ȃ킿40ms�Ō��o�ɂ��������Ƃ��̌v���f�[�^�ł���B
|
2�𑗐M |
�S�𑗐M |
|
0.0202 |
0.0406 |
|
0.0202 |
0.0406 |
|
0.0202 |
0.0406 |
|
0.0202 |
0.0406 |
|
0.0202 |
0.0406 |
|
0.0202 |
0.0406 |
|
0.0202 |
0.0406 |
|
0.0202 |
0.0406 |
�\�P
�@���o�ɂ����Ԋu��Z�����āA�Z���T���ӂ����ꂽ�܂܂��ƕ\�̂悤�Ɍ��o�Ԋu�����̂܂܋L�^�����B�E�F�C�g���[�`����10ms������ȊO�ɂ������̃X�e�b�v���lj�����Ă���̂Ő��m��20ms�A40ms�ɂ͂Ȃ�Ȃ��B
�ł́A���ۂɒ���1.670m�̎��ɒ��a3cm�d��118.60g�̐�������PicTimer�Ōv������������̕\�Q�Ɏ����B���̒��a�ƃZ���T�ʉߎ��̑������猟�o�Ԋu������B(�\2�ł͐��l12�𑗐M����0.12�b�҂��Ď������o)�U��q���[�h�͍H�v����Ε��̂̑傫���𑪂邱�Ƃɂ����p�ł���B
|
������[s] |
����[s] |
�� |
|
1.2030 |
|
|
|
1.3875 |
2.5905 |
9.8245 |
|
1.2023 |
|
|
|
1.3883 |
2.5906 |
9.8237 |
|
1.2024 |
|
|
|
1.3893 |
2.5917 |
9.8154 |
|
1.2013 |
|
|
|
1.3888 |
2.5901 |
9.8275 |
|
1.2013 |
|
|
|
1.3896 |
2.5909 |
9.8214 |
|
���� |
2.5908 |
9.8225 |
�\�Q
�@�U��q���[�h�ł̎�����B���[���L�^���ꂽ�f�[�^�ł���B2��̌v����1�����ɂȂ邽�߂��̒l���^�̗�ɂȂ�B�E�[�͎����̌�������d�͉����x�����Z�o�������̂ł���B
���ɂS�̃Z���T�����č��Z�����ŋL�^�^�C�}�ōs���Ă���d�͉����x�̑�������{�����BPicTimer�̃|�[�g��}19�̂悤�ɏォ��RB6,RB7,RB4,RB5�̏��ɃZ�b�g����B�Z���T�������Ȃ����̂Ōv���̑O�Ɏ����̂悤�ɉ�H�`�F�b�N������Ƃ悢�BPicTimer�ɓd��������4�̃Z���T�Ƀ��C�g�Ă�B�����Đ}1���Q�l�ɂ��Ċ�Տ��16F84��RB6,RB7,RB4,RB5�[�q�̓d�����e�X�^�[�ő���B���C�g���������Ċe�[�q��High�̏�Ԃł����5V���x�̓d��������ł���B���Ƀ��C�g�ƃZ���T�̊Ԃ��Օ����A�e�[�q�̓d����0V�܂ʼn�����Ή�H��͖�肪�Ȃ��B

�}19 4�Z���T���[�h�ł̏d�͉����x�����
�����Q�����x����4�̃��C�g�ƂS�̃Z���T���X�^���h�ɃZ�b�g�B1�Ԗڂ̃Z���T���X�^�[�g�ƂȂ�A3�_�ł̒ʉߎ������L�^����B
�X�^�[�g�̃Z���T����ŏ��̌v���܂ł̋�����63.5cm�A����99.0cm�A�Ōオ157.5cm�ł���B���̎����Ńf�[�^���Ƃ����̂͐}20�̂悤��3��ނ̃{�[���ɂ��Ăł���B������5���Ȃ����̕��ς��o�����BPicTimer�ł̑��茋�ʂ͕\�Q�̂悤�ɂȂ����B

�}20 ���肵������
�}���̋������͒��a3cm�A�d��118.6gw�A�}���̃S�����͒��a3.4cm�d��30.07gw�A�}���̃X�|���W���͒��a6.8cm�A�d��12.61gw
|
�������a�R���� |
|
�S�����a�R�D�S���� |
|||||||||||
|
�d���P�P�W�D�U�O���@ |
|
�d���R�O�D�O�V�� |
|||||||||||
|
t[s] |
��[m/ss] |
Vo[m/s] |
|
t[s] |
��[m/ss] |
Vo[m/s] |
|||||||
|
0.2762 |
�@ |
�@ |
|
0.2734 |
�@ |
�@ |
|||||||
|
0.3617 |
�@ |
�@ |
|
0.3586 |
�@ |
�@ |
|||||||
|
0.476 |
10.0044 |
0.9278 |
|
0.4728 |
9.9909 |
0.9694 |
|||||||
|
0.2746 |
�@ |
�@ |
|
0.2652 |
�@ |
�@ |
|||||||
|
0.3598 |
�@ |
�@ |
|
0.3499 |
�@ |
�@ |
|||||||
|
0.4729 |
10.2385 |
0.9096 |
|
0.4661 |
9.4617 |
1.1741 |
|||||||
|
0.2774 |
�@ |
�@ |
|
0.2626 |
�@ |
�@ |
|||||||
|
0.3627 |
�@ |
�@ |
|
0.3477 |
�@ |
�@ |
|||||||
|
0.4779 |
9.8288 |
0.9471 |
|
0.4622 |
9.7875 |
1.1457 |
|||||||
|
0.2663 |
�@ |
�@ |
|
0.2676 |
�@ |
�@ |
|||||||
|
0.351 |
�@ |
�@ |
|
0.3536 |
�@ |
�@ |
|||||||
|
0.465 |
9.9401 |
1.076 |
|
0.4679 |
9.9095 |
1.0478 |
|||||||
|
0.2708 |
�@ |
�@ |
|
0.2731 |
�@ |
�@ |
|||||||
|
0.3559 |
�@ |
�@ |
|
0.3593 |
�@ |
�@ |
|||||||
|
0.4694 |
10.1087 |
0.9828 |
|
0.4735 |
9.9989 |
0.9591 |
|||||||
|
0.2722 |
�@ |
�@ |
|
0.267 |
�@ |
�@ |
|||||||
|
0.3572 |
�@ |
�@ |
|
0.3523 |
�@ |
�@ |
|||||||
|
0.4712 |
10.0171 |
0.9825 |
|
0.4666 |
9.8929 |
1.0675 |
|||||||
|
���� |
10.0229 |
0.971 |
|
���� |
9.8402 |
1.0606 |
|||||||
|
|
�X�|���W���a�U�D�W���� |
|
|||||||||||
|
|
�@�@��R�����@�@�@�@�d���P�Q�D�U�P���@�@��R�L��@ |
|
|||||||||||
|
|
t[s] |
��[m/ss] |
Vo[m/s] |
��[m/ss] |
Vo[m/s] |
�� |
|
||||||
|
|
0.2913 |
�@ |
�@ |
�@ |
�@ |
�@ |
|
||||||
|
|
0.3782 |
�@ |
�@ |
�@ |
�@ |
�@ |
|
||||||
|
|
0.5054 |
7.8409 |
1.135 |
11.3316 |
0.5224 |
0.3045 |
|
||||||
|
|
0.2873 |
�@ |
�@ |
�@ |
�@ |
�@ |
|
||||||
|
|
0.3756 |
�@ |
�@ |
�@ |
�@ |
�@ |
|
||||||
|
|
0.5046 |
7.5272 |
1.2222 |
10.7662 |
0.6518 |
0.291 |
|
||||||
|
|
0.2946 |
�@ |
�@ |
�@ |
�@ |
�@ |
|
||||||
|
|
0.3819 |
�@ |
�@ |
�@ |
�@ |
�@ |
|
||||||
|
|
0.5098 |
7.774 |
1.1079 |
11.1743 |
0.4951 |
0.341 |
|
||||||
|
|
0.296 |
�@ |
�@ |
�@ |
�@ |
�@ |
|
||||||
|
|
0.3842 |
�@ |
�@ |
�@ |
�@ |
�@ |
|
||||||
|
|
0.5142 |
7.4804 |
1.1398 |
10.9693 |
0.5068 |
0.3455 |
|
||||||
|
|
0.2999 |
�@ |
�@ |
�@ |
�@ |
�@ |
|
||||||
|
|
0.3866 |
�@ |
�@ |
�@ |
�@ |
�@ |
|
||||||
|
|
0.5145 |
7.8255 |
1.0481 |
11.5186 |
0.3794 |
0.3639 |
|
||||||
|
|
0.2965 |
�@ |
�@ |
�@ |
�@ |
�@ |
|
||||||
|
|
0.3836 |
�@ |
�@ |
�@ |
�@ |
�@ |
|
||||||
|
|
0.5116 |
7.7776 |
1.0891 |
11.353 |
0.4486 |
0.3399 |
|
||||||
|
|
���� |
7.7042 |
1.1237 |
11.186 |
0.5007 |
0.331 |
|
||||||
�\2�@�R�̋��̗̂�������
5��̑���ς����l�B�X�|���W���͑����ɔ�Ⴗ���R���l�����ĎZ�o�������Ə����A��R�萔���}�E���ɂ���B
�\�Q����X�|���W���̏ꍇ�͖��炩�ɋ�C��R���֗^���Ă���̂Ŏ��̂悤�ɑ����ɔ�Ⴗ���R���l�������B
![]()
![]() �@��(�P)
�@��(�P)
���ꂩ��c��萔�Ƃ��Ay(0)=0�Ƃ��A ���̉���B
![]() �@��(2)
�@��(2)
�����ł͌��_�ȊO�ɂR��(�����A�ʒu)�����肳��Ă���̂ł���𐔎������\�t�g�ł���20���܂ł�FIT�����A���̋ߎ�������(�Q)�̓W�J���Ɣ�r���A�R���܂ł̌W������k�Ag�Ac�ĕ\�Q���쐬�����B
�V�D����̉ۑ�
�@��ʓI�ȕ����̏d�͉����x�̑��������PIC��p������H�̍쐬��������邱�ƂŐ��k�̊l��������e�͈ꋓ�ɖL�x�ɂȂ�B1000�~���x�Ŏ���ł����H�ł����x�̍������������҂ł���Ɠ����ɐ��k�Ɏ��珬���ȃ`�b�v���R���g���[������y���݂����������邱�Ƃ��ł���B
�v��ʂƂ���ŋ��t�����k�̔\�͂����邱�Ƃ�����B�w�Z�ɖ����Ă���Â�PC�������Ƃ��Ă͏\���ł���B����Ɏ����f�[�^����͂��Ă����w�K���ł���B�������A���K�����̋��ނ͐��k�̐��������ƑΉ��ł��Ȃ��B�ŋ߂ł͏��l���̎��Ƃ��F�߂��Ă��Ă���̂ŕ����̒ʏ�̃J���L���������z�����Ƃ���ł��������u���ʍ��Z�ł����{���Ă�����ƍl����B
�Q�l������
1) 16F84�̏ڍׂɂ��Ă͎��̕������ڂ����B�P����
400�~�O��ŗ��ʂ��Ă���B�ŋ߂�20MHz�ŋ쓮�\��16F84-20/P��������10MHz�ŋ쓮���Ă����Ȃ��B
�uPIC�����`�b�v�}�C�N���R���g���[���[�@��b�ҁv
(��)�}�C�N���A�v���P�[�V�������{���g���[(2000)
PIC��Peripheral Interface Controller(���Ӌ@�퐧��f�q)�̗��ł���B
2)�@16F84�𗘗p�����d�q�H����发�Ƃ��Ă�
�@�@�u���̂����ł���PIC�v���O���~���O�Ɛ�������v
�@�@�����d�@��w�o�ŋǁ@��ؔ��N�u�@���@(2002.3)
�u�d�q�H��̂��߂�PIC���p�K�C�h�u�b�N�v
�@�@�Z�p�]�_�Ё@��ՓN��@���@(2000.5)
3)�@PIC�̐�����http://www.microchip.co.jp/�@
PIC���C�^�����̔����Ă���B
4)�@�d�q���i���̔̔��@http://akizukidenshi.com/
PIC�J���p�v���O�������ꓙ�������Ă���B
5) ���ɋ����whttp://www.hyogo-u.ac.jp/index-j.html
�@�@�Z�p�ȁ@���Y�������@PIC�𗘗p�����������{�b�g�̌��J�u���Ȃǂ����{����Ă���B
6)�W���p���G���L�b�g��2300�~���x�Ŋ����i��̔�http://www2.wbs.ne.jp/~buster/index.htm
7) ���ɃV���v���ň����Ɏ���ł���PIC���C�^�Ƃ��Ă͎���JDM��URL���Q�Ƃ���Ƃ悢�B
�@http://www.jdm.homepage.dk/newpics.htm
8) �o�h�b�a�`�r�h�b�@�H���d�q
�@�uC����ɂ��PIC�v���O���~���O����v
�@�Z�p�]�_�Ё@��ՓN��@���@(2001.1)
9)�@MPLAB IDE Microchip�Ђ̓����\�t�g����HP���疳���Ń_�E�����[�h�ł���BASM�t�@�C�����쐬�AHEX�t�@�C�����o�͂���B�V�~�����[�V�������ł��邪���{��ɑΉ����Ă��Ȃ��B����₷�������́u�͂��߂Ă�PIC�}�C�R���v�@�I�[�����@�����^���@���@(2001.8)
10)�@ �t�H�g�_�C�I�[�h�ƃA���v�Ȃǂ�g�ݍ���OPIC�ƌĂ��IC�ASanyo��SPS-443-1��150�~���x�B�f�[�^�t�ŗ��ʂ��Ă���B�{�e�Ō��X�C�b�`�Ƃ��ė��p����OPIC��1S1U60�ł���p�ł��邪�P����480�~�ƍ����B
11) LED.ASM����і{�e�̃\�[�X�t�@�C���̓_�E�����[�h�̃R�[�i�[����_�E�����[�h�ł���B�R���p�C���ς̃t�@�C����MPLABver6�p�̃v���W�F�N�g�t�@�C��������BPicTimer�̊ȈՉ��������B
12) �A�Z���u�������ASM�t�@�C����HEX�t�@�C���Ƃ��ďo�͂����B�ŐV�̃c�[����Microchip�Ђ����LHP����_�E�����[�h�ł���B��������������Ă���Bhttp://www.microchip.co.jp/tool.htm
����ɉ���₷���g�������u�͂��߂Ă�PIC�}�C�R���v�@�I�[�����@�����^���@���@(2001.8)
���Q�l�ɂ���Ƃ悢�B
13) Microchip�Ђ�PIC���C�^���g�p���Ȃ��ꍇ��
�@�@IC-Prog�𗘗p���ď������݂������Ȃ��B�ŐV�ł͉��LHP���疳���Ń_�E�����[�h�ł���B
�@�@http://www.ic-prog.com/index1.htm
�@�@IC-Prog�̓��{��������ш�����PIC���C�^�̍쐬�ɂ��Ă͉��LHP���Q�l�ɂ���Ƃ悢�B
�@�@http://cgi.biwa.ne.jp/~jr3roc/pic/
14)
74�V���[�Y�ɂ͑���AND�AOR�AXOR�Ȃǂ̘_����H�����������̂��o�Ă���B�P����10�~���x�Ŏ�ɓ���B
15)
PN�ڍ��̌����ɂ��Ă�
�@�@�u�}���@�d�q�f�o�C�X�v�@�Y�Ɛ}��
�@�@�����A�씨�h�u�A��얞���A�c�����@����(1998)
�@�@�t�H�g�_�C�I�[�h�Ȃǂ̃Z���T�ɂ��Ă�
�@�@�u�Z���T�v�@�R���i�Ё@�猴���G�@��(1996)
�@�@�t�H�g�_�C�I�[�h�Ȃǂ̃Z���T�ɂ��Ă�
�@�@�u�Z���T�v�@�R���i�Ё@�猴���G�@��(1996)
�@�@�u�Z���T�Ɗ�b�Z�p�v�@�H�w�}���������
�@�@�@�@�@�@��C���Y�@��(1994)
�@�@���f�o�C�X�ɂ��Ă�
�@�@�u�I�v�g�E�f�o�C�X���p�m�E�n�E�v
�@�@�@CQ�o�ŎЁ@�J�P���@�Ғ��@(2000)
16)
�A�Z���u���t�@�C������PicTimer.ASM
VisualBasic�U�p�̃v���O������
�P�Ǝ��s�p��PicTimer.exe�A�@�\�[�X�v���W�F�N�g�t�@�C����pictimer.vbp�ł���B
�����̓_�E�����[�h�̃R�[�i�[����_�E�����[�h�ł���B
�܂��\�[�X�t�@�C�����C������ꍇ�̓V���A���ʐM�p��OCX�Ƃ���HKComm6.OCX�𗘗p���Ă���B����͉��L�̃T�C�g���疳���œ���ł���B
http://www.vector.co.jp/soft/dl/win95/prog/se094850.html
VisualBasic�𗘗p�����ʐM�E����v���O�����ɂ��Ă͎����Q�l�ɂ���Ƃ悢�B
�uVisualBasic�ŃG���W���C�v���O���~���O�v
CQ�o�ŎЁ@�ݖ싱���@���@(1998.10)
17)�@ �u���̂����ł���PIC�d�q�H��v
�@�@�����d�@��w�o�ŋǁ@��ՓN��@���@(2000.7)
18)�@ ��p�̃G�f�B�^�͍����ł��邪���LURL���疳���̂��̂���ɓ���B�����ŏЉ����H���x�ł���Ώ\���쐬�ł���B�@http://www.vector.co.jp/soft/win95/business/se056371.html�@�u�v�����g��G�f�B�^PCBE�v
�@�@�@�܂��A�_�E�����[�h�̃R�[�i�[���炱��PCBE�ō쐬����PicTimer�̃v�����g��p��H�}���_�E�����[�h�ł���B
19) �}14,15,16�̊����p�̕��i�ɂ��Ă͎��̃T���n���g��HP���Q�l�ɂ���Ƃ悢�B
�@�@http://www.sunhayato.co.jp/